Plan a survey mission, set altitude and overlap, upload to the FC, and execute in Auto mode.
Alpha stage. This guide is based on bench-level testing only. Some steps may change as we validate on real hardware. Check back once we ship a stable release.
This guide walks you through planning an automated survey mission in ADOS Mission Control. You will define an area, generate a survey grid pattern, set flight parameters, upload the mission to your flight controller, execute it in Auto mode, and download logs afterward.By the end, your drone will have flown a complete survey pattern autonomously.
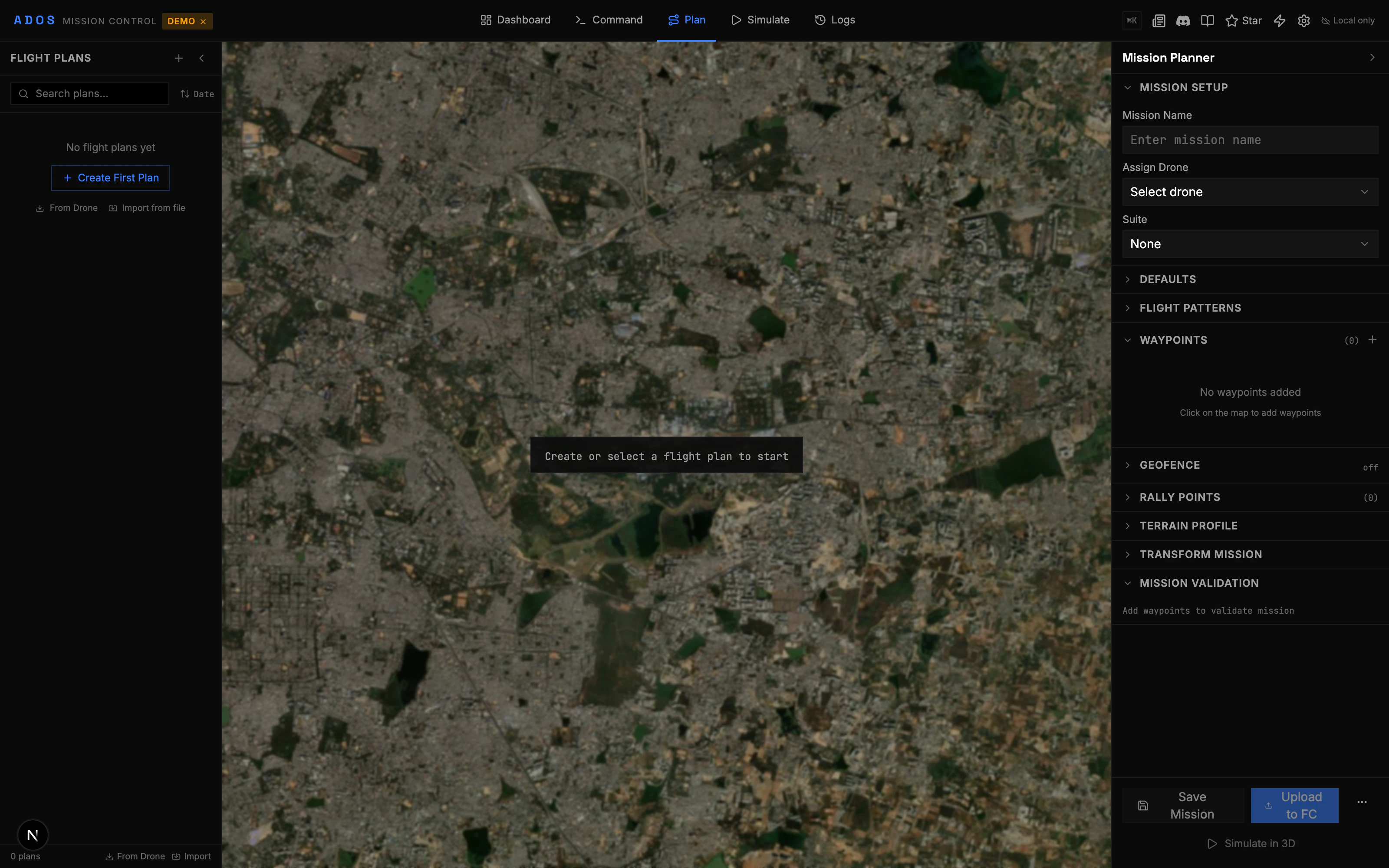
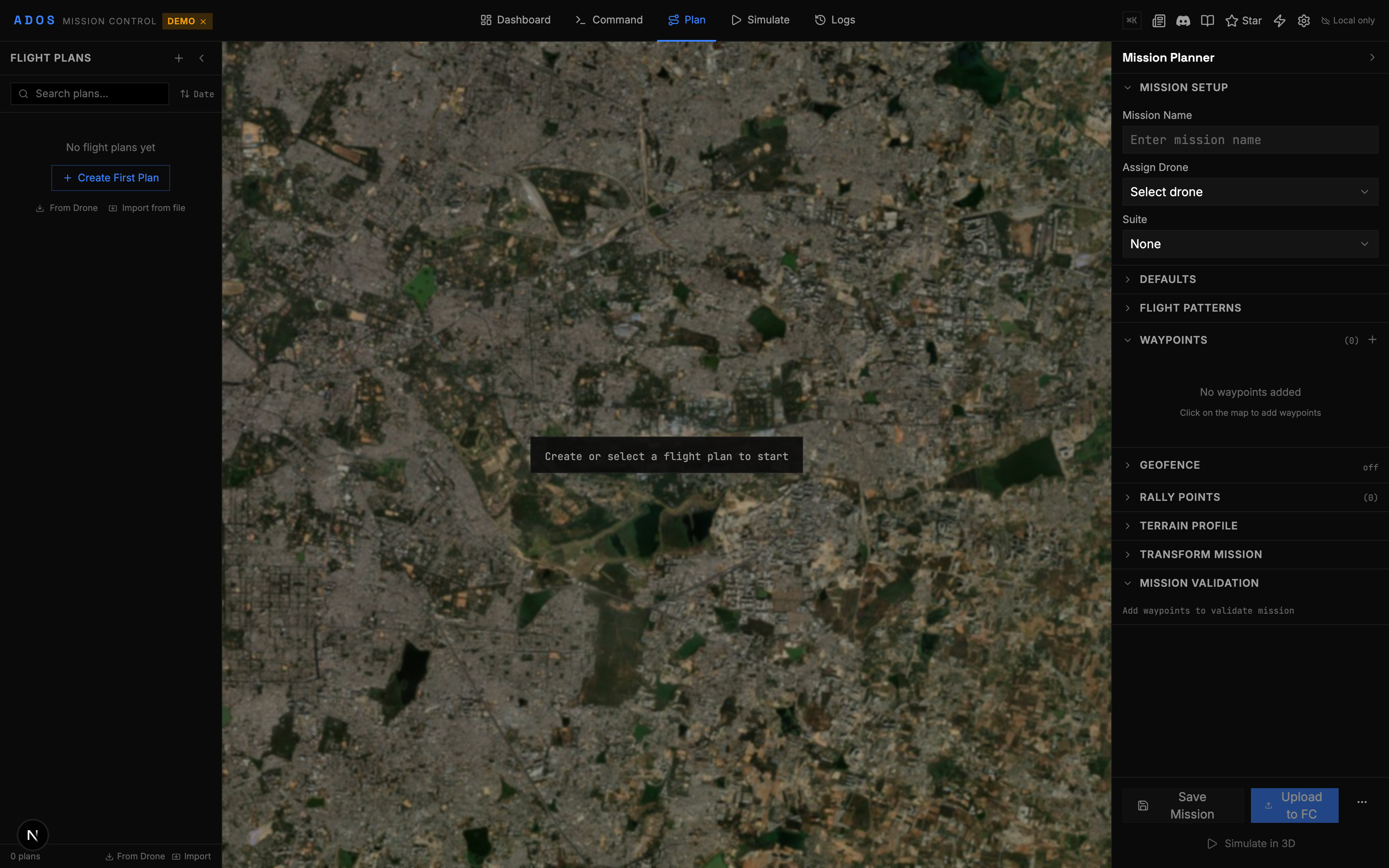
Click the Plan tab in the main navigation. You will see a map view with your current GPS position (if connected to a FC with GPS) or a default location.The left panel shows the mission tools: waypoint list, pattern generators, settings, and import/export.
Mission Plan tab with an empty map ready for waypoint placement
2
Define the survey area
You have two options:Option A: Draw on the map
Click the Draw Polygon tool in the toolbar
Click on the map to place polygon vertices around the area you want to survey
Close the polygon by clicking the first vertex or double-clicking
Option B: Import a boundary
Click Import in the tools panel
Load a KML, GeoJSON, or CSV file with your survey boundary
The polygon appears on the map
The polygon defines where the drone will fly. Make it slightly larger than your actual area of interest to account for camera overlap at the edges.
3
Generate the survey pattern
With the polygon selected, open the Pattern Generator panel and choose Survey Grid.The survey grid generator creates a lawnmower pattern that covers the entire polygon. Configure these settings:
Setting
What It Controls
Recommended Start
Altitude
Flight height above ground
50m for general mapping, 30m for detail
Speed
Ground speed during survey legs
5-8 m/s
Overlap (front)
Image overlap along the flight direction
75%
Overlap (side)
Image overlap between adjacent legs
65%
Angle
Grid rotation angle
0° (north-south legs) or auto-optimize
Camera trigger
How the camera fires
Distance-based or time-based
Click Generate. The pattern appears on the map as a series of parallel waypoints.
Survey grid pattern generated over a defined polygon area
The auto-optimize angle option rotates the grid to minimize the number of turns. This saves battery and flight time. For rectangular fields, the optimal angle usually aligns with the longest edge.
4
Review the mission details
After generating the pattern, the tools panel shows:
Total waypoints: Number of mission items
Total distance: Flight path length in meters
Estimated time: Based on your speed setting
Leg count: Number of parallel survey legs
Photo count: Estimated images based on overlap and altitude
Scroll through the waypoint list to inspect individual points. Each waypoint shows:
Sequence number
Latitude/longitude
Altitude (relative to home or terrain)
Command type (NAV_WAYPOINT, DO_SET_CAM_TRIGG_DIST, etc.)
Click any waypoint in the list to highlight it on the map. Click a waypoint on the map to select it in the list.
5
Add takeoff and return-to-launch
A mission needs a takeoff command at the beginning and a return-to-launch (RTL) at the end.
Click Add Takeoff at the top of the waypoint list. Set the takeoff altitude (typically the same as your survey altitude).
Click Add RTL at the bottom of the list.
The complete mission sequence is now:
1. TAKEOFF to 50m2-N. Survey waypoints (NAV_WAYPOINT + camera triggers)N+1. RTL (return to launch and land)
6
Set geofence (optional but recommended)
A geofence defines a boundary the drone cannot cross. If the drone reaches the fence, the FC triggers a failsafe action (RTL, land, or brake).
Click the Geofence tool
Draw a polygon larger than your survey area (give 50-100m buffer)
Set the maximum altitude (100m is a common default)
Set the breach action (RTL recommended)
On ArduPilot, this uses the FENCE_ENABLE, FENCE_TYPE, and FENCE_ACTION parameters. Mission Control handles the parameter mapping automatically.
7
Set rally points (optional)
Rally points are alternate landing locations. If the drone triggers RTL and cannot reach home (wind, obstacles), it goes to the nearest rally point instead.
Click the Rally Points tool
Click on the map to place rally points at safe landing spots
Set the altitude for each point (the drone approaches at this altitude before descending)
8
Validate the mission
Click Validate in the tools panel. The validator checks for:
Missing takeoff command
Missing RTL or land command
Waypoints outside the geofence
Altitude violations (too low, too high)
Speed violations
Duplicate waypoints
Distance between waypoints (too close or too far)
Errors appear in red. Warnings appear in yellow. Fix any errors before uploading. Warnings are advisory.
Make sure your flight controller is connected (green status indicator in the top bar). The FC must be online for mission upload.
2
Upload
Click Upload Mission in the tools panel.Mission Control sends the mission items to the FC using the MAVLink mission protocol:
Sends MISSION_COUNT with the total number of items
FC requests each item with MISSION_REQUEST_INT
GCS sends each MISSION_ITEM_INT
FC sends MISSION_ACK when all items are received
A progress bar shows the upload. Typical upload time: 1-5 seconds depending on mission size and connection speed.
Mission Control uses MISSION_ITEM_INT (message 73) for all mission uploads. This is the modern format with integer latitude/longitude (1e7 scaling) for higher precision. Older MISSION_ITEM (message 39) is supported for downloads but not used for uploads.
3
Verify the upload
After upload, click Download Mission to read the mission back from the FC. Compare the downloaded mission with your plan. The waypoints, altitudes, and commands should match exactly.This step catches rare transmission errors. If anything looks wrong, re-upload.
Arm the drone in Stabilize or Loiter mode first. Do not arm directly in Auto mode for your first mission. This gives you a chance to take off manually and verify flight behavior before handing over to autonomy.Click Arm and confirm.
3
Take off manually
Take off to a safe hover altitude (3-5 meters). Verify the drone is stable and responsive.
4
Switch to Auto
Click the mode selector and choose Auto. The drone will immediately start flying toward the first waypoint.What happens:
The drone climbs to the mission’s first waypoint altitude
It flies to waypoint 1 (the takeoff point, already at altitude)
It begins the survey pattern, flying leg by leg
Camera triggers fire at the configured interval
At the last waypoint, it executes the RTL command
It flies back to the launch point and lands
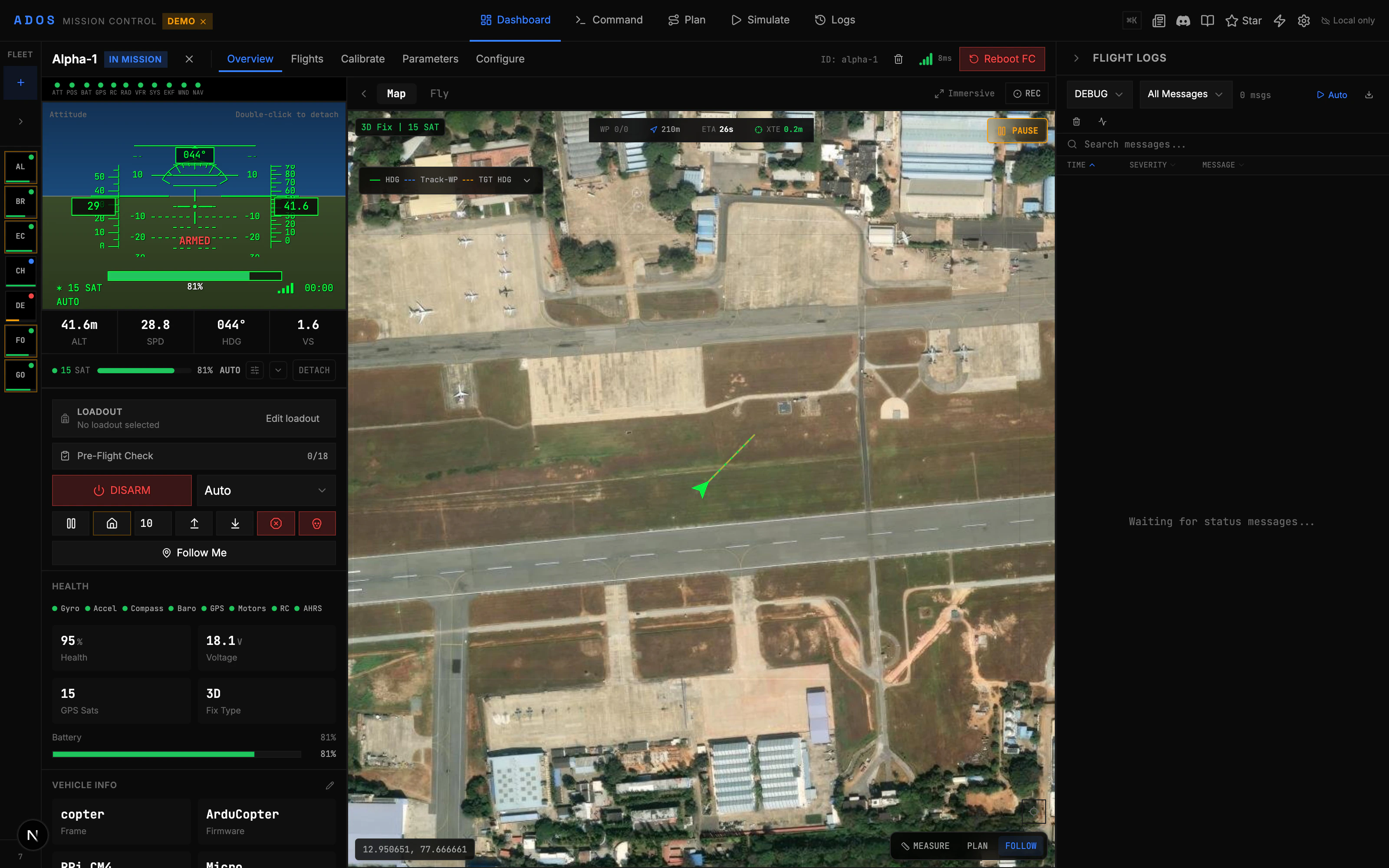
Mission execution in Auto mode showing the drone's progress along the survey pattern
5
Monitor the flight
While the mission runs, watch:
Progress: The active waypoint is highlighted on the map. Completed legs change color.
Altitude: Verify the drone is holding the target altitude.
Battery: Watch voltage sag under load. If you see voltage dropping faster than expected, be ready to abort.
Ground speed: Should be close to your configured speed.
Camera triggers: The mission item count increments as camera commands execute.
Keep your finger on the mode switch. If anything goes wrong, switch to Loiter to stop, or RTL to bring it home.
6
After landing
The drone will auto-land at the launch point (RTL) and auto-disarm.If you need to abort mid-mission:
Only use emergency disarm (cutting motors) as an absolute last resort. The drone will fall from whatever altitude it is at. Use RTL or Land for controlled returns.
If you have cloud features enabled (Convex backend), missions are saved to the mission library in the cloud. You can browse, duplicate, and re-use past missions. This is useful for recurring survey jobs where you fly the same pattern regularly.
Before flying a real mission, you can simulate it.
Go to the Simulate tab
Select your uploaded mission
Click Play
The simulator shows:
3D visualization of the flight path on terrain
Camera trigger points marked on the map
Estimated timing for each leg
Altitude profile along the route
Terrain clearance warnings if the flight path gets too close to the ground
This is not a physics simulation (use SITL for that). It is a geometric visualization that helps you verify your mission makes sense before committing a battery to it.
Altitude matters. Lower altitude = higher resolution photos but more flight legs and longer mission time. 50m is a good balance for general mapping. 25-30m for detailed inspection. 80-100m for large area overview.Overlap is important. 75% front overlap and 65% side overlap is the starting point for photogrammetry. If your processing software struggles to stitch images, increase side overlap to 70-75%.Wind check. Survey missions fly at constant speed. Headwind legs are slower (use more battery). Tailwind legs are faster. Plan the grid angle perpendicular to the wind direction when possible, so wind is a crosswind on the survey legs.Battery budget. Plan for 70% of your battery capacity, not 100%. Keep 30% as margin for wind, unexpected maneuvers, and RTL. Check your estimated flight time against your battery’s known endurance.