How Configuration Works
Every panel follows the same workflow:- Read from FC: Click “Read” to fetch parameters from the flight controller.
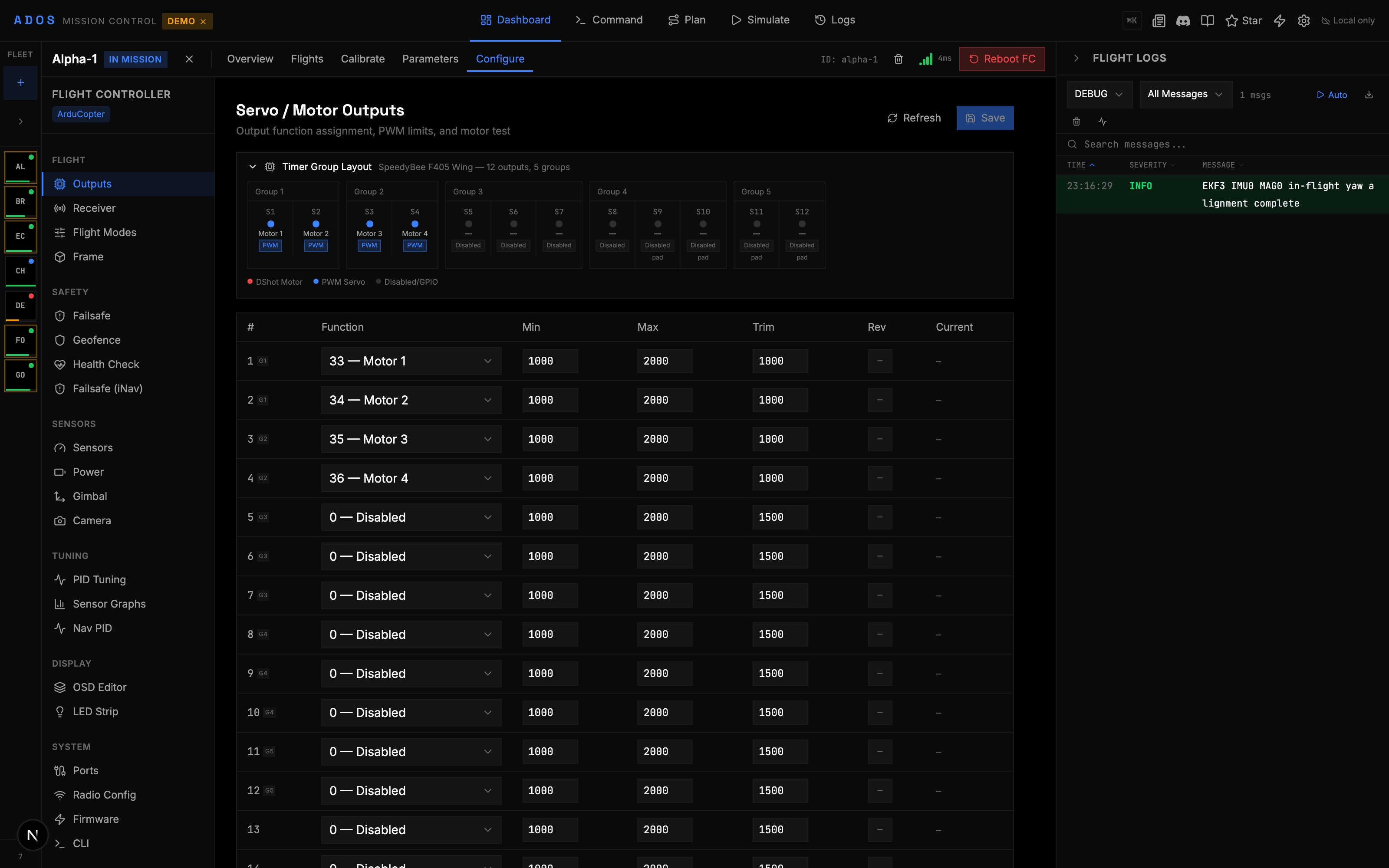
- Edit values: Change parameters in the UI. Modified values are highlighted.
- Save to RAM: Click “Save” to write changes to the FC’s working memory.
- Write to Flash: Click “Write to Flash” to persist changes across reboots. (ArduPilot auto-saves to EEPROM on each parameter write, so this is a belt-and-suspenders step.)
Parameters cannot be written while the vehicle is armed. The armed-lock overlay blocks all writes as a safety measure. Disarm first, then configure.
Panel Categories
Flight
Safety
Sensors
Tuning
Display
Communications
Power
Peripherals
Debug
Firmware
Parameters
Calibration
Firmware-Specific Panels
Some panels only appear for certain firmware:
The FC configuration navigation filters panels by the
requiredCapability field. Only panels compatible with the connected firmware appear.
Safety Features
- Armed lock: All parameter writes are blocked while the vehicle is armed
- Unsaved changes guard: Navigating away from a panel with dirty (unsaved) parameters triggers a warning
- Parameter validation: Values are checked against min/max ranges before writing
- Reboot banner: Panels that require a reboot after changes show a persistent banner