Creating a Mission
1
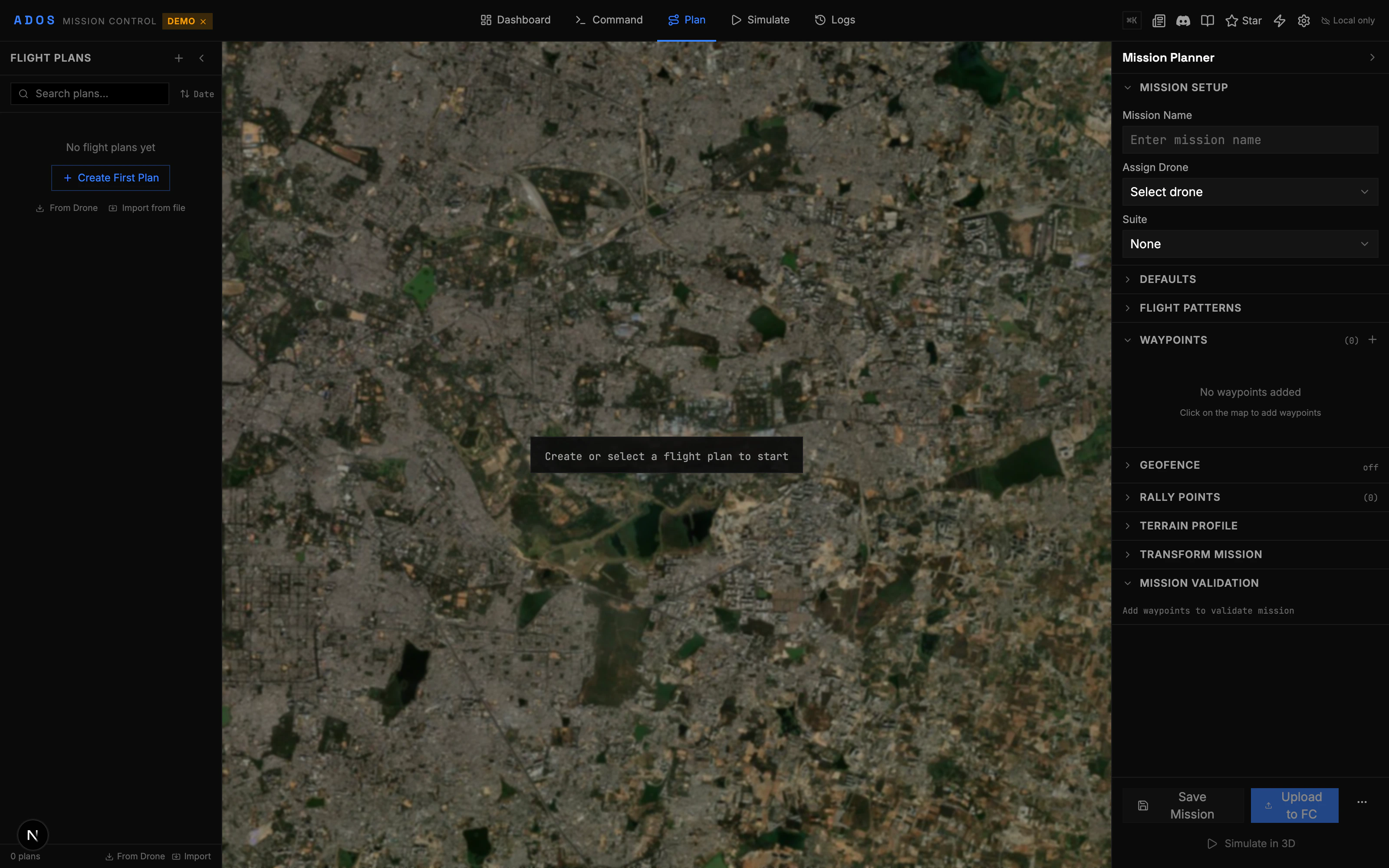
Open the Plan tab
Click “Plan” in the top navigation bar. The map fills the screen with a toolbar on the left and a mission editor on the right.
2
Add waypoints
Click on the map to place waypoints. Each click adds a numbered waypoint at that location. Waypoints are connected by lines showing the flight path.
3
Edit waypoint properties
Click a waypoint marker to select it. The right panel shows its properties: latitude, longitude, altitude, speed, delay, and command type.
4
Set altitude mode
Choose between relative (above home), absolute (above sea level), or terrain-following altitude for each waypoint.
5
Validate the mission
Click the validate button. The validation engine checks for common issues before upload.
6
Upload to FC
Send the mission to the flight controller. The upload progress is shown in real time.
Map Toolbar
The left-side toolbar provides drawing and editing tools:
Right-click the map to open a context menu with additional options: insert waypoint here, set home position, center map, and more.
Mission Editor
The right panel shows the mission as an ordered list of waypoints and commands:- Reorder waypoints by dragging
- Delete individual waypoints
- Edit properties inline (altitude, speed, delay, command type)
- Add commands between waypoints (DO_SET_SERVO, DO_CHANGE_SPEED, DO_SET_CAM_TRIGG_DIST, etc.)
Supported Commands
Mission Control supports the standard MAVLink mission item commands:Terrain Following
Enable terrain following to maintain a consistent altitude above ground level (AGL), even over hilly terrain. How it works:- The planner fetches elevation data from the Open Elevation API for each waypoint.
- Waypoint altitudes are adjusted so the drone maintains your specified AGL at every point.
- The terrain profile chart at the bottom shows ground elevation vs. flight altitude.
- Ground elevation line
- Flight path altitude line
- AGL clearance at each waypoint
- Warnings where clearance is below a threshold
Batch Editor
The batch editor lets you modify multiple waypoints at once:- Set altitude for all selected waypoints
- Set speed for all selected waypoints
- Adjust altitude by a relative offset (e.g., raise all by 10m)
- Apply terrain following to a selection
Mission Transforms
Move, rotate, or scale an entire mission without editing individual waypoints:- Move: Drag the mission to a new location. All waypoints shift by the same offset.
- Rotate: Spin the mission around its center point. Enter a rotation angle in degrees.
- Scale: Grow or shrink the mission. Enter a scale factor.
Mission Stats Bar
The bottom bar shows live statistics about your mission:- Total distance
- Estimated flight time (based on configured speed)
- Number of waypoints
- Altitude range (min and max)
- Estimated battery usage
Validation
Before uploading, the validation engine checks your mission for issues:Errors (must fix)
Errors (must fix)
- No waypoints in mission
- Waypoints outside geofence (if one is set)
- Altitude below minimum safe altitude
- Missing takeoff command at the start
- Invalid command parameters
Warnings (should review)
Warnings (should review)
- Very high altitude waypoints
- Long distances between waypoints
- Speed changes that may exceed airframe limits
- Mission exceeds estimated battery capacity
- No RTL or Land command at the end
Download and Upload
See File Formats for details on each format.