Telemetry Categories
Position
Power
GPS
Attitude
Radio Link
EKF Status
The Extended Kalman Filter (EKF) estimates the drone’s position and velocity by fusing sensor data. Mission Control shows EKF health as colored bars:
Green means good. Yellow is marginal. Red means the EKF is not converged, and the drone should not fly in GPS-dependent modes.
Vibration
Telemetry Deck
The telemetry deck is a configurable panel that lets you choose which metrics to display and how they are organized. It supports four pages:
Each page shows selected metrics as compact blocks with the current value and a mini sparkline.
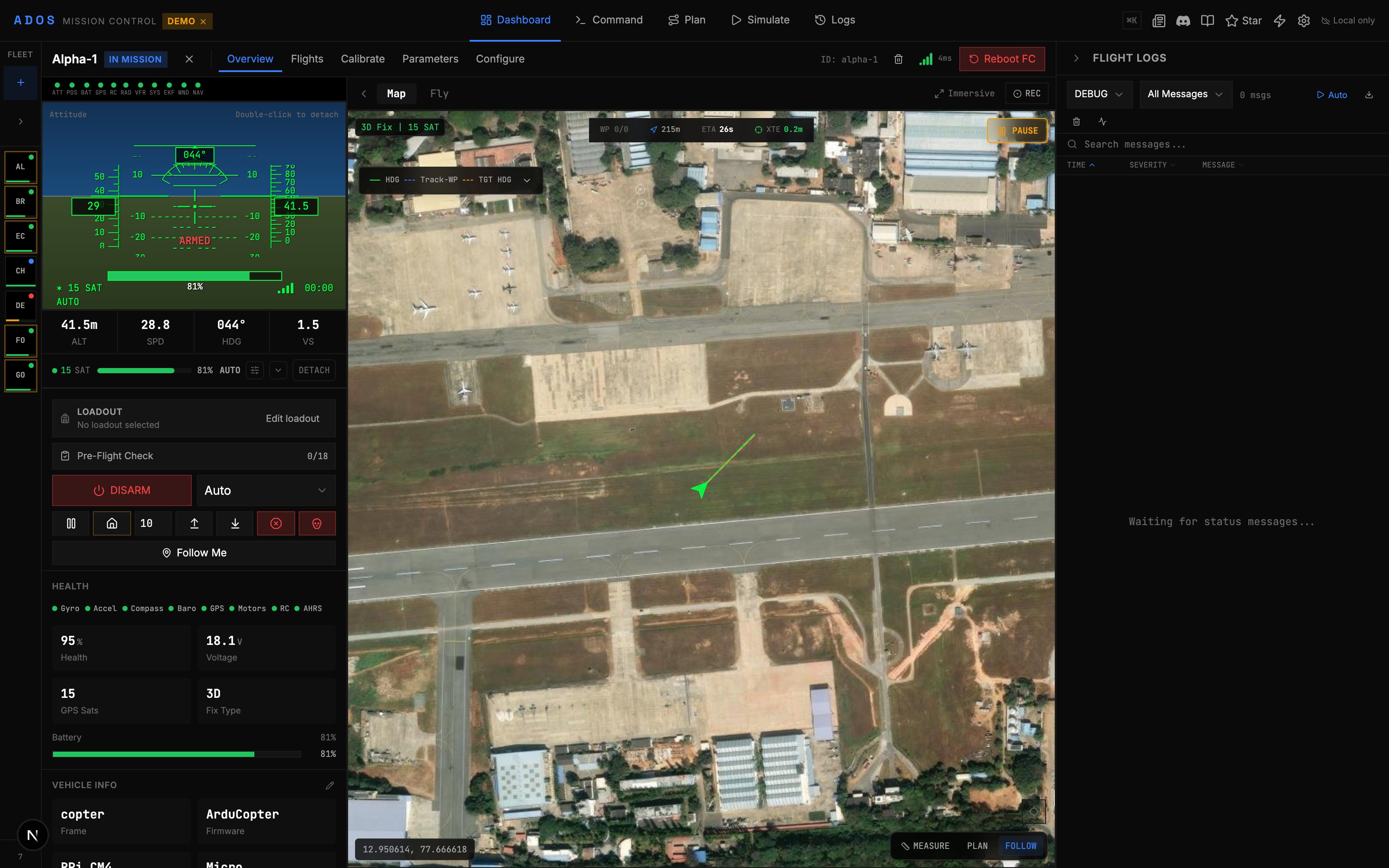
Sensor Health Grid
The sensor health grid shows the status of all connected sensors:- Gyro, Accelerometer, Magnetometer: Per-sensor health with individual status indicators
- Barometer: Altitude consistency check
- GPS: Fix quality and satellite count
- Optical Flow: If equipped, flow quality indicator
- Rangefinder: If equipped, altitude measurement status
Alert Feed
The GCS generates alerts based on telemetry thresholds:- Low battery warnings at configurable thresholds
- GPS degradation when satellite count drops or HDOP increases
- Failsafe triggers relayed from the flight controller
- Fence breach alerts when the drone crosses a geofence boundary
- EKF status changes from good to warning or error
- Radio link degradation based on RSSI thresholds
Freshness Indicators
Every telemetry value has a freshness check:- Fresh: Data received within the last 10 seconds. Displayed normally.
- Stale: No update for 10-30 seconds. Values dim to indicate they may be outdated.
- Offline: No update for over 30 seconds. Values show a disconnected state.