Home
The dashboard’s/home route is the live operations board. It renders
two layouts depending on profile: a drone-focused board with flight
telemetry tiles and a video panel, and a ground-station board with WFB
receive plus mesh tiles.
Drone profile
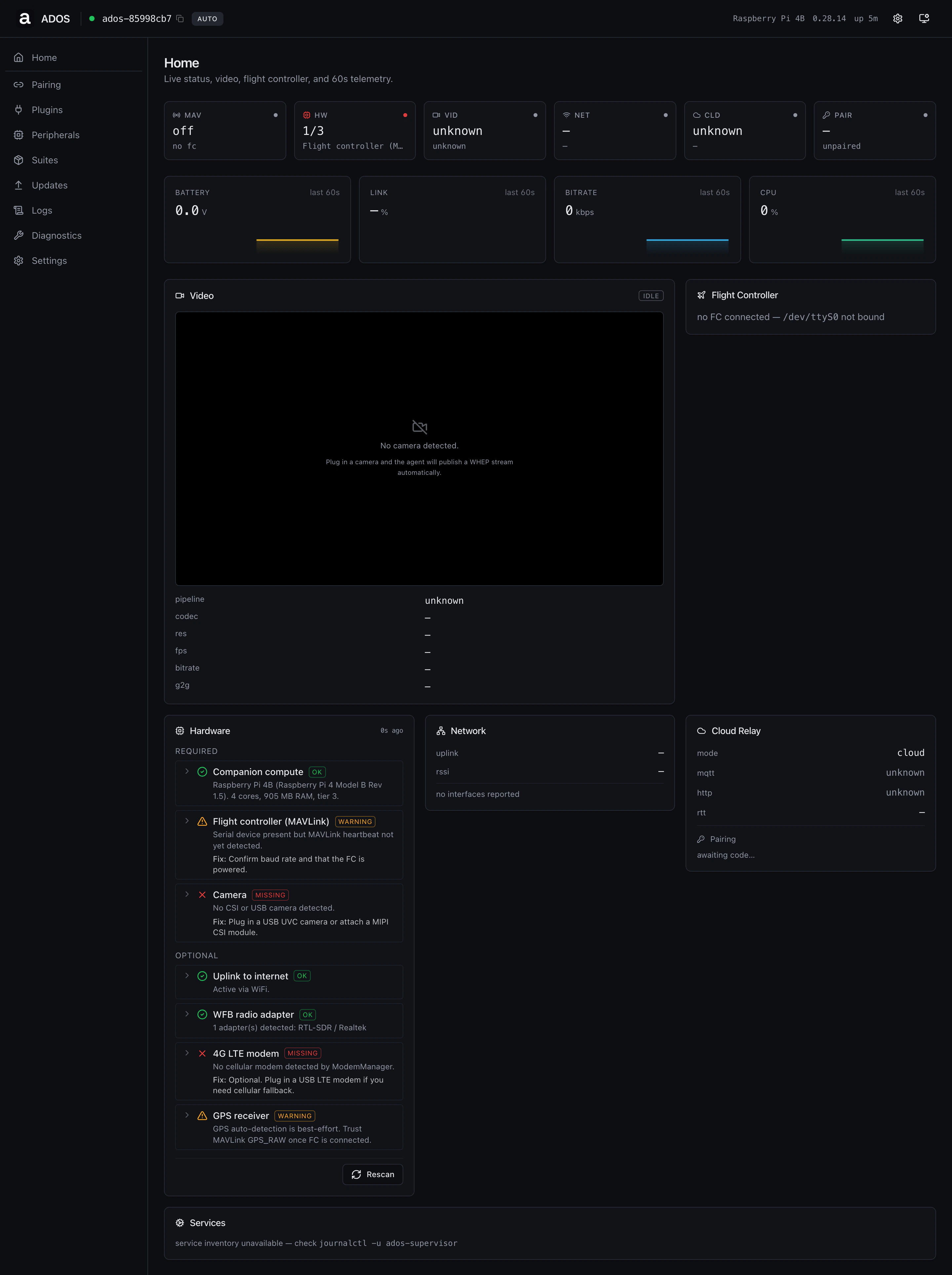
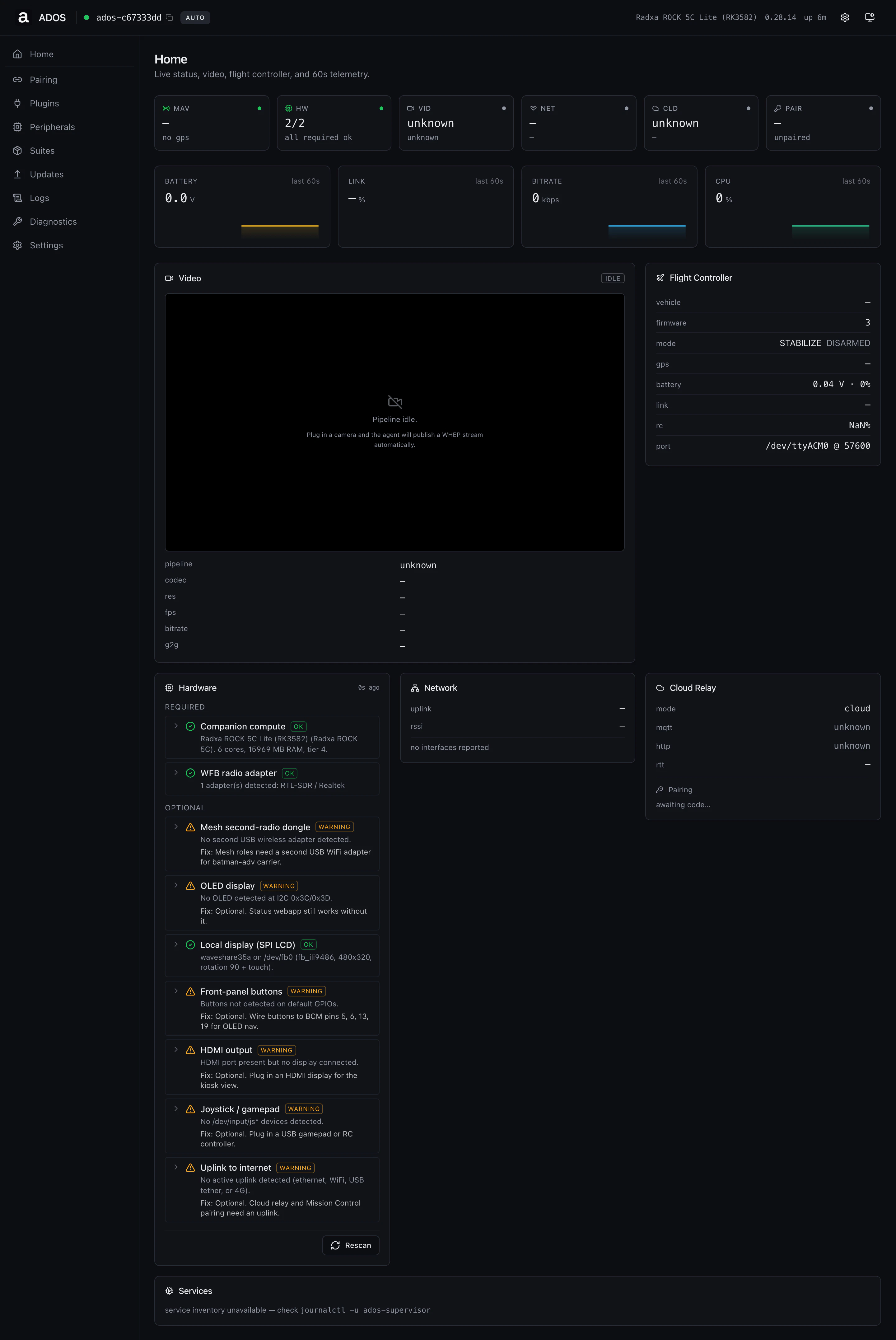
Tiles
Sparklines
A 60-second history of battery voltage, link percent, video bitrate, and CPU draw. Each chart updates every poll tick (about 1 Hz) from the dashboard snapshot endpoint.Panels
- Video: the live stream. WHEP first, HLS fallback, snapshot fallback. Reads encoder details (codec, resolution, fps, bitrate, glass-to-glass latency) from the snapshot.
- Flight Controller: connection state, vehicle type, firmware, mode, arm state, GPS fix and satellites, battery voltage and remaining, RC link, prearm.
- Hardware: the required and optional component list, the same rows the wizard’s hardware check used.
- Network: active uplink, RSSI, IP addresses by interface.
- Cloud Relay: MQTT, HTTPS heartbeat, RTT, pairing state.
- Services: quick health line for the systemd unit set.
Ground-station profile
Tiles
Same chrome as the drone home, with link tiles oriented toward the receive side (WFB-rx, mesh peers, downlink quality).Panels
- WFB Receive: adapter, channel, RSSI, packet loss, FEC counters, active streams.
- Mesh: visible when the node’s role is
relayorreceiver. Shows batman-adv peers, gateway node, partition state, and the local mesh address. - Sources: visible only on the
receiverrole. Aggregated bitrate, frames combined, dedup, per-relay FEC stats. - Hardware, Network, Cloud Relay, Services: same set as on the drone home.
Backend endpoints
Troubleshooting
Tiles say `unknown` after a fresh boot
Tiles say `unknown` after a fresh boot
The snapshot endpoint takes a couple of polls to populate. Wait 5-10
seconds. If they stay unknown, check that the
ados-supervisor service
is running in Diagnostics.Video panel shows `No camera detected`
Video panel shows `No camera detected`
The agent did not see a UVC or CSI camera. Open Peripherals and confirm
the camera enumerates. The detection is hot-plug aware, so plugging the
camera in should resolve within a poll cycle.
Cloud Relay says `awaiting code`
Cloud Relay says `awaiting code`
The agent is unpaired. Open Pairing, copy the code, paste it into
Mission Control. The relay reconnects automatically after a successful
pair.