Pairing
The Pairing page exposes the agent-to-Mission-Control pair flow on both profiles. The page copy adapts to say “this drone” or “this ground station” based on the active profile.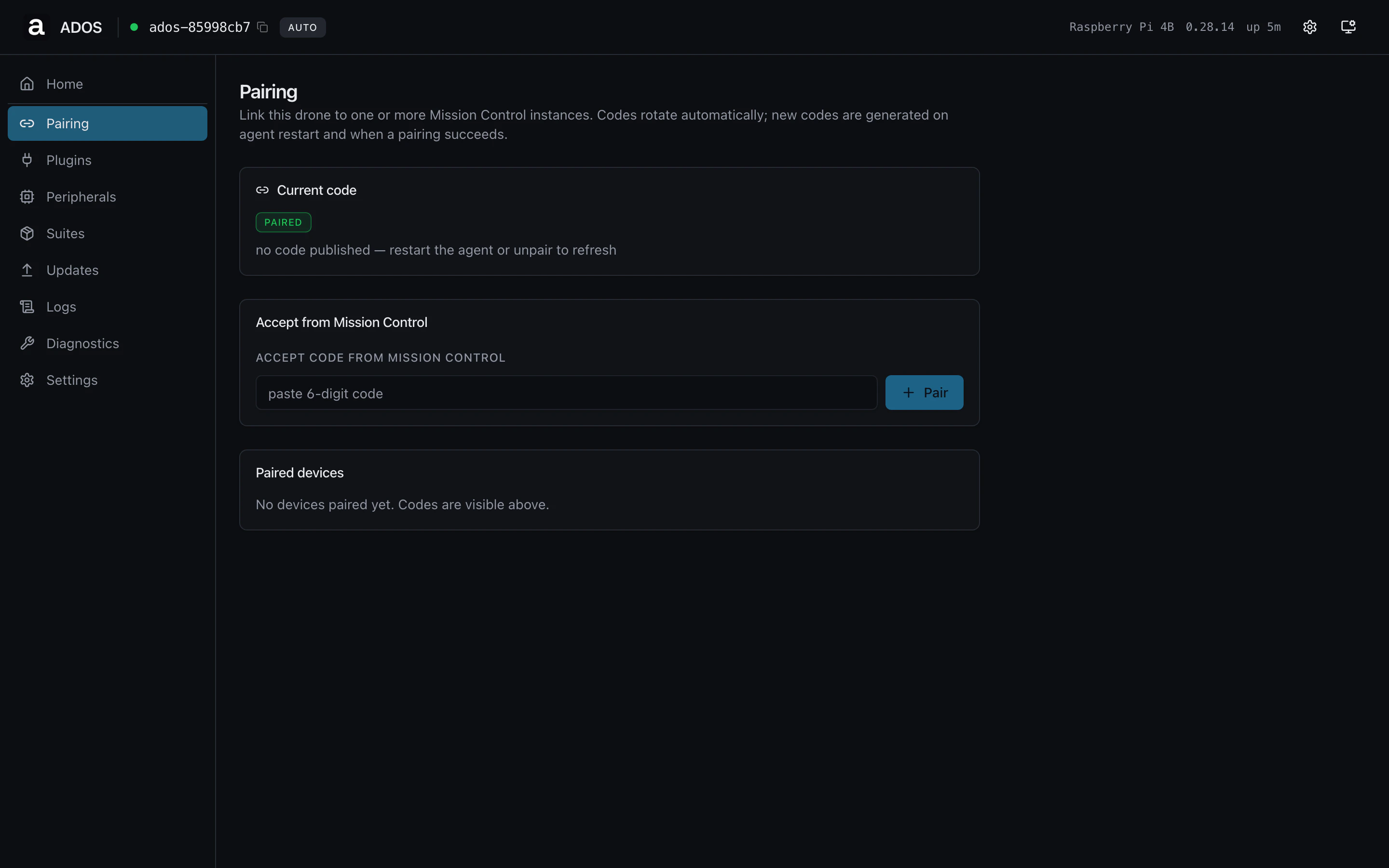
Sections
Current code
The six-character code currently published by the pairing beacon. Rotates on agent restart and on every successful pair. Apaired badge
shows when at least one Mission Control instance is paired; otherwise
it shows awaiting pair.
Accept from Mission Control
Paste a code that Mission Control shows during its own pairing UI and click Pair. Used when Mission Control initiates the pair instead of the agent. The form clears after success.Paired devices
A list of every Mission Control client currently paired with this node. Click Unpair all to revoke every key in one action; the next code rotation completes after the revoke.Common operations
1
Pair a fresh Mission Control
Copy the code shown under Current code, open Mission Control,
click “Pair a drone”, paste the code, confirm.
2
Unpair
Click Unpair all to revoke every key. The Cloud Relay tile on
Home flips back to
awaiting code within a poll cycle.Backend endpoints
Troubleshooting
No code shown
No code shown
The node is already paired and not publishing a beacon. Unpair if you
want a fresh code, or open Mission Control’s pair-existing flow and
type the device ID instead.
`accept` returns 409
`accept` returns 409
You tried to accept a code on an already-paired node. Unpair first or
add the new client through Mission Control’s UI.